StepMotor01.ino=================================
//스태핑 모터 1초 텀을 두고 반 시계 방향, 시계 방향으로 한 바퀴씩 회전 반복
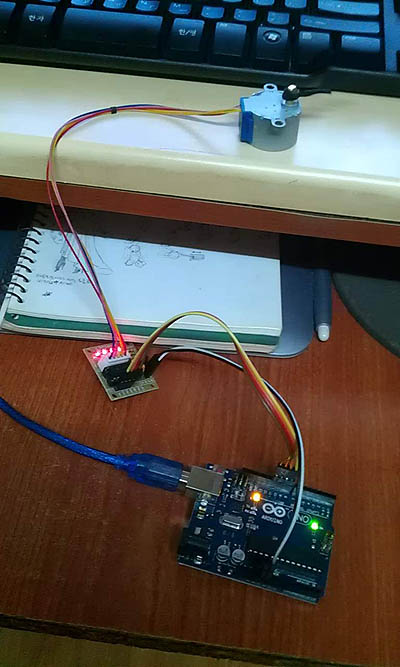
//스태핑모터 선을 모터 드라이버 모듈의 잭에 맞춰 끼우기.
//모터 드라이버 모듈의 IN1,2,3,4 각각 D8, D9, D10, D11에 연결.
//모터 드라이버 모듈의 +, - 각각 5V, GND에 연결.
#include //스태핑 모터용 라이브러리 불러오기
//회전각도 설정 2048:한바퀴(360도), 1024:반바퀴(180도)
const int stepsPerRevolution = 2048;
//스태핑 모터 객체 생성
//(회전 각도, 드라이브에 연결된 핀 IN4, IN2, IN3, IN1의 핀연결 설정)
Stepper myStep(stepsPerRevolution, 11, 9, 10, 8);
void setup(){
myStep.setSpeed(14); //모터 회전속도 설정
Serial.begin(9600); //시리얼 모니터 켜기
}
void loop(){
//시계 반대 방향으로 한바퀴 회전
Serial.println("BackClockwise"); //시리얼 모니터에 출력
myStep.step(stepsPerRevolution);
delay(1000); //1초 대기
//시계 방향으로 한바퀴 회전
Serial.println("Clockwise");
myStep.step(-stepsPerRevolution);
delay(1000);
}
StepMotor02.ino==========================================
//스태핑 모터 반 시계 방향으로 한 바퀴, 시계 방향으로 반 바퀴 회전 반복
//스태핑모터 선을 모터 드라이버 모듈의 잭에 맞춰 끼우기.
//모터 드라이버 모듈의 IN1,2,3,4 각각 D8, D9, D10, D11에 연결.
//모터 드라이버 모듈의 +, - 각각 5V, GND에 연결.
#include
const int stepsPerRevolution = 200;
Stepper myStep(stepsPerRevolution, 11, 9, 10, 8);
void setup(){
myStep.setSpeed(100);
}
void loop(){
for(int i = 0; i < 2048; i++){
myStep.step(1);
delay(10);
}
for(int i = 0; i < 1024; i++){
myStep.step(-1);
delay(10);
}
}
StepMotor03.ino===========================================
//스태핑 모터 반 시계 방향으로 13의 속도로 계속 회전시키기
//스태핑모터 선을 모터 드라이버 모듈의 잭에 맞춰 끼우기.
//모터 드라이버 모듈의 IN1,2,3,4 각각 D8, D9, D10, D11에 연결.
//모터 드라이버 모듈의 +, - 각각 5V, GND에 연결.
#include
const int stepsPerRevolution = 2048;
Stepper myStep(stepsPerRevolution, 11, 9, 10, 8);
void setup(){
myStep.setSpeed(13);
}
void loop(){
myStep.step(stepsPerRevolution);
} |